Links to external sources may no longer work as intended. The content may not represent the latest thinking in this area or the Society’s current position on the topic.
Beyond Challenger: a new age of deep-sea science and exploration
Scientific discussion meeting organised by Dr Kerry Howell, Professor Paul Tyler, Dr Alan Jamieson and Dr Bhavani Narayanaswamy
The deep-sea is the largest ecosystem on earth covering 60% of the planet’s surface. However, our fundamental knowledge of this ecosystem has been limited by the logistical challenges of conducting research in this environment. This meeting explored how recent developments in autonomous and robotic technologies could bring about a step-change in deep-sea research, ultimately revolutionising understanding of global biodiversity.
The schedule of talks and speaker biographies are available below. Recorded audio of the presentations will be available on this page soon.
Enquiries: Contact the Scientific Programmes team.
Organisers


Schedule
Chair

Professor Michael Rex, University of Massachusetts Boston, USA
Professor Michael Rex, University of Massachusetts Boston, USA
Michael Rex is a Professor of Biology at the University of Massachusetts. Since 1973, he has conducted research on the evolutionary ecology of deep-sea benthic mollusks, and the structure and function of deep-sea communities. This work has involved large-scale biogeography including bathymetric and latitudinal gradients of biodiversity, population differentiation and speciation, larval development and dispersal, and adaptive radiation. Current research centers on patterns and causes of β-diversity, the changes in species composition along environmental gradients and their causes. He has worked with Federal Government agencies on conservation and management of deep-sea communities, particularly in connection with petroleum exploration. He is co-author of Deep-Sea Biodiversity: Pattern and Scale, Harvard University Press.
| 09:05 - 09:30 |
Before HMS Challenger: from earlier expeditions to lobbying for the deep
The voyage of HMS Challenger from 1872 to 1876 is often credited with laying the foundations of modern oceanography, as a consequence of its global scope and multidisciplinary approach, which opened up the "sealed interior" of the oceans described by Matthew Fontaine Maury two decades earlier. But the Challenger expedition did not spring fully formed into existence; it built on knowledge and experience obtained by earlier expeditions, such as the Royal Society's charters of HMS Lightning in 1867 and HMS Porcupine in 1868 and 1869 for scientific investigations in the northeast Atlantic. Obtaining government backing for a global voyage of exploration also involved considerable lobbying by William Carpenter, through public talks and mobilising the support of notable 19th century scientists including Charles Lyell, Thomas Huxley, John Tyndall, and William Herschel. The eventual award of £200,000 for the Challenger expedition, equivalent to around £29.5 million today, was driven by promised vistas of scientific discovery and the importance of understanding more about the ocean floor for laying submarine telegraph cables. In this talk Dr Copley will outline the circumstances that gave rise to the Challenger expedition, and how it secured a lasting legacy among other voyages of ocean exploration during the same period. 
Dr Jon Copley, University of Southampton, UK
Dr Jon Copley, University of Southampton, UKDr Jon Copley is Associate Professor of Ocean Exploration and Public Engagement at the University of Southampton. His research investigates the ecology, biogeography, and life-history biology of species occupying island-like habitats on the ocean floor, such as hydrothermal vents and cold seeps. He has more than twenty years of experience in exploring the deep ocean, including leading expeditions aboard research ships, using remotely operated vehicles and human-occupied vehicles, and discovering new species of deep-sea animals. Jon is also the first British ‘bathynaut’ to dive more than 5 km deep, and member of the team that made the first dives in minisubmarines to reach 1 km deep in the Antarctic for the filming of BBC Blue Planet II. He is a previous recipient of the Royal Society of Biology Science Communication Award for Established Researchers and the British Science Association Charles Lyell Lecture Award. |
|
|---|---|---|
| 09:30 - 10:00 |
What lives in the deep-sea? A not-so-ancient answer to an ancient question
In the early days of deep-sea exploration, it was quite acceptable in the scientific community to wonder if any animals at all can live in the deep sea, and if they were there, what on earth they might look like. Ancient lineages of life that have long since gone extinct in our shallow seas? Giant monsters with peculiar adaptations to the cold and dark? Today these old-fashioned questions would probably not pass through a grant-awarding committee. Simply knowing what is there is not enough. Science demands numbers, functions, genomes, applications. But the simple truth is that every deep-sea biologist, waiting on the back deck of a ship for their samples to come up, or watching the screen of an ROV, still ponders these questions - with a remarkably open-mind as to what on earth they might find. It is a common refrain to hear that ‘most of the deep-sea is unexplored’. However, this is not entirely true. We do actually have rather a lot of samples and knowledge of the deep sea. The main issue is that those samples, and the treasures they hold, are not being described, archived and communicated in the comprehensive manner that so defined the Challenger expedition. In my talk, I will propose a 21st century approach to an old problem - what lives in the deep sea? 
Dr Adrian Glover, Natural History Museum, UK
Dr Adrian Glover, Natural History Museum, UKDr Adrian Glover leads the Deep-Sea Systematics and Ecology Group at the Natural History Museum (NHM), London (www.nhm.ac.uk/deep-sea). The group is an active research group dedicated to the highest-quality deep-ocean and polar research, with emphasis on molecular systematic and ecological approaches to fundamental questions in biology. The deep-sea is the world largest and least-explored ecosystem, and Adrian’s group undertakes regular oceanographic expeditions to sites across the world, from the poles to the tropics. The group uses the latest DNA taxonomy methods to describe new species, study their evolutionary origin, investigate their ecological interactions and test general theories in biodiversity sciences. The deep-ocean is the world’s largest new resource frontier and is currently being actively explored for marine mineral extraction, new hydrocarbon industries and deep-water fisheries. The group is committed to providing the highest-quality scientific data to support the sustainable management of these new industries through national and international regulatory bodies. The NHM receives in the region of 5 million unique visitors per year, and Adrian contributes extensively to a range of public engagement activities to showcase his group’s research, the remarkable collections housed in the NHM Darwin Centre and the importance of sustainable solutions to ocean management. |
|
| 10:00 - 10:30 | Discussion | |
| 10:30 - 11:00 | Coffee | |
| 11:00 - 11:20 |
End-to-end understanding of energy flow at hydrothermal vents
Hydrothermal vents form ephemeral deep-sea habitats that occur along seafloor spreading centres and subduction zones as well as in association with volcanic seamounts. Diverse chemotrophic microbial communities form the base of the food web. These bacteria take advantage of redox disequilibria and a variety of carbon sources to gain “energy” for growth and cell maintenance. Ultimately, this chemosynthetic primary production supports localised, high metazoan biomass in relation to the surrounding deep-sea. Stable isotopes are often used by geochemists, microbiologists and ecologists to understand geochemical processes and “energy” flow through biological systems. Ecologists require an understanding of the basal and primary producer stable isotope dynamics in order to place in context the stable isotope values of metazoan consumers. However, there are often spatial and temporal mismatches in sample collection within many hydrothermal vent fields which hinder our understanding of trophic interactions and “energy” flow from the mantle to the consumer. There is currently a requirement for synthesis within the stable isotope literature that will identify key data gaps, which may bridge disciplines, to be filled. This will allow the development of multi-level isotopic landscapes or “isoscapes” over hydrothermal vent fields which will provide better understanding of the primary production utilised by consumers. Moving forward, these “isoscapes” need to work in parallel with the development of processed based models that will allow analysis and prediction of key biochemical processes that shape the “energy” landscape within hydrothermal vents. 
Dr William Reid, Newcastle University, UK
Dr William Reid, Newcastle University, UKDr William Reid is an ecologist interested in the structure and dynamics of complex systems with particular emphasis on how microbes and metazoans interact with one another and their environment. Over the last 15 years, a large proportion of Dr Reid’s research has involved investigating energy flow and trophodynamics in Antarctic and deep-sea benthic systems. This has progressed from analysing stomach contents of Antarctic fish whilst working for British Antarctic Survey to the biochemical analysis of animal tissue samples collected from Antarctic hydrothermal vents during Dr Reid’s PhD at Newcastle University. Now, his post-doctoral research is looking at integrating data from different disciplines in order to model ecosystem processes at varying scales. This reflects Dr Reid’s interest in taking an interdisciplinary approach to research. |
|
| 11:20 - 11:45 |
Into the great wide open: plumbing ocean depths in the 21st century
Expanding global interest in the extraction of living and non-living resources from Areas Beyond National Jurisdiction creates both opportunity and challenge. Opportunity for economic benefits from the deep sea juxtaposes challenges in sustainable use of the Earth’s largest, most pristine, and least known habitats. The deep ocean faces stressors from distant sources as climate change warms, acidifies and de-oxygenates deep waters in which microplastics and other human waste are now nearly ubiquitous. Fortunately, new technologies paired with developments in marine conservation and area-based management tools, such as marine protected areas (MPA), offer potential pathways to effective strategies for sustaining deep-sea ecosystems. Rapidly emerging technologies (genetics, imaging, sensors and observation platforms, data and modelling) can inform effective MPA design and management in deep-sea environments, drawing on new approaches to map habitats, evaluate their spatial extent and connectivity, and informing size and spacing elements. Collectively, these tools can help address the unique conservation issues for deep-sea biota (sparse data, low population size, many rare species, examples of late reproducers with limited fecundity) and ecosystems (lack of habitat maps, expansive habitat types interspersed with discrete and sometimes rare and specialized habitats) that require considerations beyond those that drive MPA design in terrestrial and coastal habitats. This discussion will draw from MPA examples in which we consider the need to include a 3D dimension in “protection” when addressing deep-sea ecosystems. 
Dr Paul Snelgrove, Memorial University of Newfoundland, Canada
Dr Paul Snelgrove, Memorial University of Newfoundland, CanadaDr Snelgrove is a Professor of Ocean Sciences and Biology at Memorial University of Newfoundland in Canada. He received a BSc Hons in Biology at Memorial in 1984, an MSc in Oceanography from McGill University in 1987, and a PhD from the Massachusetts Institute of Technology/Woods Hole Oceanographic Institution in 1993. He held a Postdoctoral Fellowship at Rutgers University Institute of Marine and Coastal Sciences, and a Killam Postdoctoral Fellowship in the Department of Oceanography at Dalhousie University. Since 2008 he has been Director of the NSERC Canadian Healthy Oceans Network, a national research network in Canada that has already trained some 100 students working on all three of Canada’s oceans to develop new tools and approaches to support sustainable oceans. He also currently plays the role of Associate Director of The Ocean Frontier Institute. From 2003-2013, Dr Snelgrove held a Canada Research Chair in Boreal and Cold Ocean Systems, and prior to that an NSERC Industrial Chair in Fisheries Conservation. He led the synthesis of the International Census of Marine Life research program, where he was a member of the program’s Scientific Steering Committee. Dr Snelgrove published the book “Discoveries of the Census of Marine Life: Making Ocean Life Count” with Cambridge University Press in 2010 and was a TED Global speaker in 2011. He was awarded the 2013 Timothy Parsons Medal for Excellence in Marine Sciences in Canada. |
|
| 11:45 - 12:15 | Discussion |
Chair

Dr Ana Hilario, CESAM, University of Aveiro, Portugal
Dr Ana Hilario, CESAM, University of Aveiro, Portugal
Dr Ana Hilário is a deep-sea ecologist at Centre for Environmental and Marine Studies of the University of Aveiro, Portugal. Ana holds a BSc in Aquatic Sciences from University of Porto (2001) and PhD in Ocean and Earth Science from Southampton University (2005). Her research focuses on three topics in deep-sea biology: 1) biodiversity and biogeography of chemosynthetic ecosystems; 2) reproductive ecology of invertebrates; and 3) population connectivity and its implications for conservation and biogeography. Ana has contributed to the policy process by authoring and reviewing the UN Assessment of the State of the Marine Environment and has worked with Portuguese Ministry of the Sea in the design of a national network of MPAs. Currently she co-leads the working groups ‘Population Connectivity’ in INDEEP (International network for scientific investigation of deep-sea ecosystems) and ‘Decade for Deep-Ocean Science’ in DOSI (Deep-Ocean Stewardship Initiative). Ana has participated in 23 oceanographic cruises dedicated to the study of deep-sea ecosystems and has a vast experience in seafloor sampling and in situ experimentation.
| 13:15 - 13:45 |
High-resolution imaging in marine habitats using Autonomous Underwater Vehicles
This talk will describe insights gained from a decade of autonomous marine systems development at the University of Sydney’s Australian Centre for Field Robotics. Over the course of this time, this group has developed and deployed numerous underwater vehicles and imaging platforms in support of applications in engineering science, marine ecology, archaeology and geoscience. The group has operated an Australia-wide benthic observing program designed to deliver precisely navigated, repeat imagery of the seafloor. This initiative makes extensive use of Autonomous Underwater Vehicles (AUVs) to collect high-resolution stereo imagery, multibeam sonar and water column measurements on an annual or semi-annual basis at sites around Australia, spanning the full latitudinal range of the continent from tropical reefs in the north to temperate regions in the south. The program has been very successful over the past decade, collecting millions of images of the seafloor around Australia and making these available to the scientific community through online data portals developed by the facility and affiliated groups. These observations are providing important insights into the dynamics of key ecological sites and their responses to changes in oceanographic conditions through time. The group has also contributed to expeditions to document coral bleaching, cyclone recovery, submerged neolithic settlement sites, ancient shipwrecks, methane seeps and deepwater hydrothermal vents. The talk will also consider how automated tools for working with this imagery have facilitated the resulting science outcomes and will explore opportunities to extend these techniques to the study of deep-sea science and exploration. 
Professor Stefan B Williams, University of Sydney, Australia
Professor Stefan B Williams, University of Sydney, AustraliaStefan B Williams is the Professor of Marine Robotics and Head of School of Aerospace, Mechanical and Mechatronic Engineering at the University of Sydney. He is a member of the Australian Centre for Field Robotics where he leads the Marine Robotics group. He is the head of Australia’s Integrated Marine Observing System Autonomous Underwater Vehicle (AUV) Facility and has led cruises to locations around Australia and overseas, focusing on collecting visual habitat mapping data in support of studies in ecology, archaeology and geoscience. His research interests include Simultaneous Localisation and Mapping in unstructured underwater environments using visual and acoustic sensing, autonomous navigation and control and classification and clustering of large volumes of data collected by robotic systems. He received his PhD from the University of Sydney in 2002 and completed a Bachelor of Applied Science in Systems Design Engineering at the University of Waterloo, Canada in 1997. |
|
|---|---|---|
| 13:45 - 14:15 |
Whole site multi-resolution photogrammetric surveys of deep-sea vents and cold seeps
There are many applications in marine science and monitoring that require high-resolution images of the seafloor to be obtained. However, the resolution of underwater observations are often at a trade-off with the extent over which they can be made, and this limits their usefulness in non-uniform seafloor environments where the distribution of features varies over spatial scales much larger than the footprint that can be observed, for example in a single image frame. This talk will describe recent efforts to address scale relevance in seafloor imaging applications by using autonomous underwater vehicles instrumented with systems that can image the seafloor from different altitudes, and build multi-hectare 3D visual reconstructions of the seafloor with resolutions with sufficiently high-resolution where needed. This allows continuous wide-area, multi-resolution 3D reconstructions of the seafloor to be generated, allowing patterns to be explored and interpreted over a large range of spatial scales that would not otherwise be possible. This approach will be described giving examples of data recently obtained in deep-sea hydrothermal vent and gas hydrate fields. 
Dr Blair Thornton, University of Southampton, UK
Dr Blair Thornton, University of Southampton, UKDr Blair Thornton is an Associate Professor at the University of Southampton with 15 years of international research experience in marine autonomy and sensing. His research focuses on improving the observational capabilities and perceptional awareness of underwater robotic systems through the development of novel in situ optical sensors and intelligent data processing methods. He is dedicated to fielding systems in real environments and overcoming bottlenecks in the flow of information from data-collection through to generating human insight. Blair holds an EPSRC innovation fellowship and is PI of NERC BioCam for the development of scalable seafloor imaging technology. He has participated in more than 45 ocean research expeditions (27 of which as principal investigator) and has spent over 380 days at sea. |
|
| 14:15 - 14:45 | Discussion | |
| 14:45 - 15:15 | Tea | |
| 15:15 - 15:45 |
An overview of recent developments in artificial intelligence and its potential applications to deep-sea exploration
AI in general and machine learning in particular have created a great deal of recent interest, not to mention hyperbole. In this talk, Jeremy Wyatt and Mohan Sridharan will give a whistle-stop tour of the current state of AI. The speakers shall describe fundamental algorithmic advances in perception, reasoning, manipulation and learning. The emphasis will be on the nature and properties of algorithms that may have utility in deep-sea exploration. Although the speakers are not currently working on AUVs, they will discuss some case studies from their own work and that of others. The talk will also cover the obvious challenges in practical deployment and some ways that these challenges may be overcome.
Professor Jeremy Wyatt, University of Birmingham, UK
Professor Jeremy Wyatt, University of Birmingham, UKJeremy L Wyatt is an Honorary Professor at the University of Birmingham. He received his PhD from the University of Edinburgh in 1997. He led the Intelligent Robotics Laboratory at Birmingham for 22 years. He has published more than 100 refereed articles, edited three books, received two best paper awards, and supervised a winner of the 2004 BCS distinguished doctoral dissertation. He led two major international projects in intelligent robotics: CogX on robot learning and planning in unfamiliar worlds and PaCMan on robot manipulation. He has also participated in twenty other national and international research projects. He works on machine and robot learning, robot task planning, cognitive architectures, robot manipulation and machine vision.
Dr Mohan Sridharan, University of Birmingham, UK
Dr Mohan Sridharan, University of Birmingham, UKDr Mohan Sridharan is a Senior Lecturer in the School of Computer Science at the University of Birmingham (UK). Prior to his current appointment, he held faculty positions at The University of Auckland (NZ) and at Texas Tech University (USA), and he continues to hold honorary positions at these institutions. Dr Sridharan received his PhD in Electrical and Computer Engineering from The University of Texas at Austin (USA). His research interests include knowledge representation and reasoning, machine learning, computational vision, and cognitive systems, as applied to robots and software agents collaborating with humans. His research and educational efforts have been supported by grants from the US Office of Naval Research, US National Science Foundation, and the Asian Office of Aerospace Research and Development. |
|
| 15:45 - 16:15 |
Sampling our oceans and issues of taxonomic identification
A severe bottleneck exists in the ecological study of our oceans and seas. This has arisen because net-sampling, having been the mainstay of biological oceanographers for over a century, has not provided sufficient data of the distributions, dynamics and populations of important taxa to answer questions posed by researchers today and in the future. In the last decade or so, in-situ, towed or ship-based imaging instruments have been developed that potentially may be able to address the shortfall. These instruments can, and will, provide denser spatial and temporal sampling that is more cost-effective than is possible with net sampling. However, there is problem. We do not have enough skilled people to identify the video and photographic hauls from the water. Artificial Intelligence has been mooted as the solution, automating identification using the latest ideas in Deep Learning. However, to be successful in using computers to automate taxonomic identification of organisms, the machines will have to learn from the vast literature that describes our natural world. Deep learning is beginning to revolutionise computer-based visual recognition, but it must be tied to natural language and the descriptions that people make in the scientific literature to be able make the transition from laboratory-sized machine classifiers to globally useful tools. We must integrate the existing taxonomic knowledge that is written and drawn with emerging AI tools. Culverhouse will explore this issue. 
Dr Philip Culverhouse, Plymouth University, UK
Dr Philip Culverhouse, Plymouth University, UKPhil Culverhouse is an Associate Professor in Computer Vision in the Centre for Robotics & Neural Systems at the University of Plymouth. He researches computer-based identification of natural objects, where he specialises in automated identification of marine species. Culverhouse has over 40 academic publications on automating identification of marine biota, and led a number of EU and other projects on plankton identification. Culverhouse convened a SCOR Working group on automatic plankton identification. He is currently interested in low cost high volume sampling and automated taxonomic processing for ship-based application. |
|
| 16:15 - 16:45 | Discussion |
Chair

Dr Christopher R German MBE, Woods Hole Oceanographic Institution, USA
Dr Christopher R German MBE, Woods Hole Oceanographic Institution, USA
Christopher German received his BA in 1984, his PhD in 1988 and his ScD in 2007 – all from the Department of Earth Sciences, Cambridge. Following a NATO Post-Doctoral Fellowship at MIT (1988-1990) he returned to the UK (IOS Deacon Laboratory, Southampton Oceanography Center) before returning to the US as Chief Scientist for the National Deep Submergence Facility. From 2005-2014, he oversaw the biggest overhaul of DSV Alvin in its >50 year history and pioneered the use of deep diving AUVs for seafloor exploration. His most recent projects have included development of the Nereus Under Ice vehicle, including Arctic expeditions in 2014 and 2016, and working with NASA to develop their Ocean Worlds program. He previously served as President of the Challenger Society and Co-Chair of both InterRidge and CoML’s ChEss program. He was honoured with an MBE in 2002, a Humboldt Prize in 2014, and was elected Fellow of The Explorers Club in 2015.
| 09:00 - 09:30 |
Remotely Operated Vehicles: taking us to new depths in ocean exploration, science and communication
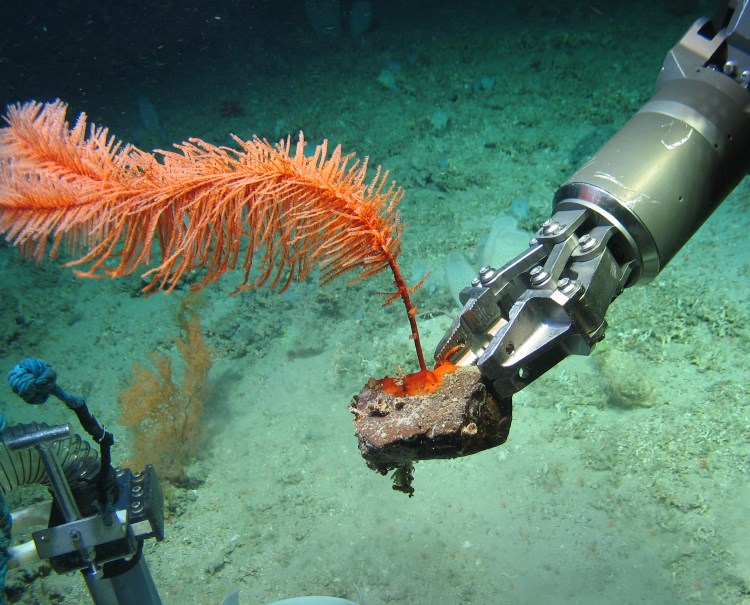
Remotely Operated Vehicles (ROVs) have been an essential part of the deep-sea tool kit since the 1980s. They act as our scientific eyes, ears and hands in a world where we cannot easily venture. ROVs have revolutionised our ability to perform tasks previously considered near impossible in the deep ocean, including the high-resolution mapping and imaging of a variety of communities and habitats, the collection of delicate specimens or detailed environmental data, and the deployment and recovery of experiments with incredible care. With ROV technology continuously evolving, we are taking deep-sea ecological research to new depths. Recent uses include the observation of bioluminescence using unique light and camera configurations, the collection of high-resolution imagery to create mosaics of vulnerable marine ecosystems such as hydrothermal vents and coral gardens, the undertaking of crucial baseline surveys to better inform the environmental management of areas where deep-sea mining may occur, and the collection of previously unknown species for thorough morphological and molecular assessment adding to our knowledge of biodiversity. Additionally, ROVs, combined with telepresence technology, have enabled a global network of scientists to work more effectively and collaboratively within and across disciplines, as well as to share the deep ocean with a wider audience. With immersive technology on the horizon, the use of ROVs is certain to diversify in the near future. 
Dr Diva Amon, Natural History Museum, UK
Dr Diva Amon, Natural History Museum, UKDiva Amon is a Trinidadian deep-sea biologist who studies chemosynthetic habitats and human impacts on the deep ocean. Diva is also interested in increasing the capacity of low to middle income countries to explore their deep oceans, as well as bridging the gap between science and policy. She is currently undertaking a two-year Marie Skłodowska-Curie research fellowship at the Natural History Museum in London, UK. In 2013, she completed her PhD at the University of Southampton, UK, after which, she spent three years at the University of Hawai’i, USA, researching the largely unknown abyssal fauna of the Clarion-Clipperton Zone, an area targeted for deep-sea mining in the Pacific Ocean. Throughout her career, Diva has participated in deep-sea expeditions around the world, exploring and studying previously unknown habitats. She has done a considerable amount of science communication and public engagement, with her work featured on CNN International, National Geographic, BBC World, etc. Diva is a co-founder of the non-profit NGO, SpeSeas, dedicated to marine science, education and advocacy in Trinidad and Tobago and the wider Caribbean. |
|
|---|---|---|
| 09:30 - 10:00 |
Use of autonomous vehicles to understand abyssal ecology
Our understanding of deep-sea ecosystems has been shaped by the technology used to observe it. In the era of the HMS Challenger, concepts of deep-sea benthic community structure and dynamics were established based on samples from trawls and dredges. While these tools are still in use today, technological developments have shifted the observation of the deep sea towards remotely-operated and autonomous platforms coupled with modern sensors, cameras, lighting, data storage and batteries. The combination of autonomous underwater vehicles (AUVs) with seabed photography has substantially increased our presence in the deep-sea environment in two main ways: by increasing the seabed area observed, and lowering the organism detection size threshold. Habitats are investigated more thoroughly (and quantitatively), and more habitats (and transitions between them) are examined, leading to improved understanding of processes and spatial relationships with scale. The impacts of this technology use are characterised by the change to our understanding of low-density abyssal communities: more morphotypes and higher densities are found, biomass estimates are significantly higher, and altered community structures are revealed. AUVs and marine photography have been applied in landscape-scale community ecology studies, with implications for assessing anthropogenic impacts and designating marine protected areas. Thus, their use has improved and increased qualitative and quantitative observation, and fundamentally altered our understanding of these environments and the processes occurring there. Some suggest that this step change in understanding ushers in a ‘new golden age of discovery’.
Dr Jennifer Durden, University of Hawaii at Manoa, USA
Dr Jennifer Durden, University of Hawaii at Manoa, USADr Jennifer Durden is a Postdoctoral Fellow at the University of Hawaii at Manoa. Her research is focused on spatial and temporal variation in the diversity, structure and function of deep-sea benthic communities, particularly those found on abyssal plains. She has applied this knowledge to developing environmental management policy improvements for polymetallic nodule mining. She has used marine photography extensively in collecting data for this research, with photographic equipment mounted on autonomous, remotely-operated and free vehicles, and is actively involved in developing and improving methods of imaging for use in quantitative deep-sea ecology. |
|
| 10:00 - 10:30 | Discussion | |
| 10:30 - 11:00 | Coffee | |
| 11:00 - 11:30 |
Advances in ecogenomic technologies in marine environments
The frequency of biological observations in the deep sea is rare in comparison with more accessible marine environments. The last decade has seen a revolution in the development and application of new technologies for biological observations, decreasing our reliance on infrequent ship-based collections, and increasing the capacity for non-invasive observation and autonomous monitoring. Among the types of biological observations, genetic observations have the advantage of reliance on DNA, which is universal to life on Earth, while RNA analysis can also deliver information on activity. “Ecogenomics” is used in this context to refer to molecular tools directed at in situ organism-environment interactions. This talk will feature discoveries made using ecogenomic sensors and samplers with a focus on deep sea microbiomes, featuring case studies from hydrothermal vents and methane seeps. This will lead into an overview of new developments in ecogenomic technologies and a vision for the application of these tools to conduct global surveillance of metazoans using environmental DNA signatures in deep sea environments. 
Dr Julie Robidart, National Oceanography Centre, UK
Dr Julie Robidart, National Oceanography Centre, UKEpisodic events (eg ocean blooms, export events, hydrothermal flow and storms) have large impacts on marine ecosystems despite their infrequency. Large areas of the globe, including remote ecosystems such as the Arctic and the deep sea, are under threat but our baseline understanding of change in these systems is currently lacking. Our ability to understand and predict the impacts of episodic events, and to fully understand dynamics of remote ecosystems, would be improved by higher-frequency autonomous sensing and sampling. Dr Julie Robidart works on novel technologies to increase the resolution of biological observing in the oceans in space, time and diversity. Julie’s group develops deployable biosensing technologies to detect key functional genes and transcripts from microbes involved in biogeochemical cycling, and eDNA tools for high-sensitivity detection of rare but important marine organisms. Her latest research involves the sequencing and analysis of environmental metagenomic and metatranscriptomic datasets to inform probe design, the development and optimization of molecular biological assays for autonomous instrumentation, and the design, development and implementation of ecogenomic sensing and sampling technologies in the ocean. |
|
| 11:30 - 12:00 |
Challenges and progress in the application of artificial intelligence to taxon identification in sea-floor imagery
Scientific research in the deep sea has always been limited by available technology. However, the development of new robotic and autonomous technology is significantly enhancing our ability to study this environment. Currently, modern underwater sampling tools, particularly Autonomous Underwater Vehicles (AUV) and Remotely Operated Vehicles (ROV), are able to collect vast image datasets, but cannot bypass the bottleneck formed by manual image annotation. Artificial intelligence (AI) and Computer Vision (CV) can be a faster, more consistent, cost effective and a sharable alternative to manual annotation. However, they are subject to a number of challenges that inhibit growth in their use. These are: 1) lack of standardisation in taxon identification between reference datasets that could be used to train CV algorithms, 2) lack of understanding by ecologists in the application and expected performance of existing open-source CV algorithms, 3) poor performance of CV with some taxa. Examples of progress being made in each of these areas is outlined. To address challenge 1 an international project to develop a single reference catalogue used in the identification of taxa from imagery is presented. To address challenge 2 the results of a study that applied CV to identification of taxa from seafloor imagery obtained from the UK’s AUV Autosub6000 is presented; and finally to address challenge 3 results from a novel investigation into the use of hyperspectral imagery in taxon discrimination is presented. 
Dr Kerry Howell, Plymouth University, UK
Dr Kerry Howell, Plymouth University, UKDr Kerry Howell is an Associate Professor at Plymouth University and head of the Deep Sea Conservation Research Unit. Kerry holds a BSc in Marine Biology from Swansea University (1997), and PhD in Deep-Sea Ecology from Southampton University (2002). She has participated in 16 research cruises and is highly experienced in the use of robotic and autonomous systems for benthic biological research. From an academic perspective her research is focused on understanding biodiversity patterns in the deep sea, including faunal zonation and species turnover with depth, as well as speciation along the depth gradient. However her real focus is in applying ecological research to support the design of effective marine protected area networks, including the creation of reliable habitat maps, and models of population connectivity that under-pin the design. |
|
| 12:00 - 12:30 | Discussion |
Chair

Dr Maria Baker, University of Southampton, UK
Dr Maria Baker, University of Southampton, UK
For over 13 years, Dr Maria Baker has held the position of international deep-sea science project coordinator, firstly for one of the 14 field projects of the Census of Marine Life programme focusing on deep-sea chemosynthetic ecosystems, and currently for INDEEP (International Network for Scientific Investigations of Deep-Sea Ecosystems) and DOSI (Deep Ocean Stewardship Initiative) programmes. Maria’s primary goal is to lead and encourage global coordination and collaboration between deep-sea scientists and other stakeholders with a view to increasing our scientific knowledge and advancing science in policy leading to robust management of our deep-oceans. During this work, Maria has co-authored numerous successful funding proposals, reports, scientific papers and books, many relating to the effects of a range of anthropogenic disturbances on marine ecosystems.
| 13:30 - 14:00 |
The challenge of exploring and protecting deep-sea ecosystems
Empirical and theoretical studies suggest that biodiversity regulates ecosystems’ functions, which are responsible for the production of goods and services for human wellbeing. A recent study conducted across a wide range of deep-sea ecosystems revealed that the functioning of the largest ecosystem on Earth is positively and exponentially related to biodiversity of benthic fauna. Such relationships suggest that a minor biodiversity loss could have dramatic consequences on ecosystem functions and services (including nutrient regeneration, biomass production, C storage, food webs). However, all biological components in deep-sea ecosystems are intimately linked, and larger organisms are tightly dependent upon either bottom-up and top-down ecological interactions, symbiotic relationships and by the role and functions of the microbial components. Here, thanks to the new tools offered by molecular analyses and massive sequencing, we explored these microbial-macrobial interactions and their role in the biodiversity-ecosystem functioning relationships. The results presented here indicate that if we want to ensure the long-term sustainability of ecosystem services in the deep sea, we need to better explore the relationships between microbial components and larger organisms. The knowledge of these interactions will expand our ability to preserve deep-sea ecosystem functioning and services, and to identify the factors potentially increasing the vulnerability of deep-sea ecosystems to biodiversity loss and the impact of global change. 
Professor Roberto Danovaro, Polytechnic University of Marche and Stazione Zoologica Anton Dohrn, Italy
Professor Roberto Danovaro, Polytechnic University of Marche and Stazione Zoologica Anton Dohrn, ItalyRoberto Danovaro is a Professor of Marine Biology at the Polytechnic University of Marche and President of the Stazione Zoologica Anton Dohrn, Naples, Italy. He was previously president of the Italian Society of Ecology, and of the Italian Society of Limnology and Oceanography and of the European Federation of Scientific Societies. Currently, he is President of the Scientific Council of WWF Italy and a member of several international panels (IUCN and UNEP). Roberto is presently coordinator of three EU projects (Horizon2020, DG ENV and EASME). He is also a member of the EU Academy of Science. Roberto received the Prize BMC Biology (London, 2010), the Award of French Society of Oceanography (2011), and the ENI Award “Protection of the Environment” (2013). Roberto is a marine biologist, working on deep-sea biodiversity and ecosystem functioning, and on the impact of climate change on deep-sea ecosystems and is author of approximately 300 ISI papers and three books. |
|
|---|---|---|
| 14:00 - 14:30 |
Nekton XL Catlin deep-ocean survey and the potential of non-government funded deep-sea exploration
The Nekton Foundation’s mission is to gather data to accelerate ocean governance. In 2016 the Nekton Foundation undertook its first mission, the XL Catlin Deep-Ocean Survey. The aim was to explore the shallow water and mesophotic ecosystems of Bermuda as well as the waters of the Sargasso Sea. Two vessels were involved in the mission, a private vessel called the Baseline Explorer and the Canadian Coast Guard Ship Hudson. New data were gathered in Bermuda using a combination of SCUBA divers, Technical divers and sumersibles (Triton 1000/2s). Findings have included confirmation of the rariphotic zone in the Caribbean, the discovery of the deepest lionfish and a previously undocumented diversity of macro algae in the rariphotic zone. The CCGS Hudson undertook oceanographic cross-sections of the Sargasso Sea as well as some benthic work on the Canadian margin and a seamount. Some of the challenges of organising expeditions on a private basis are discussed. Nekton will undertake its next mission in the Indian Ocean in March 2019. REV Ocean is a new Foundation founded by the Norwegian billionaire Kjell Inge Rokke. They are currently constructing a new 182 meter long research vessel to be launched at the end 2020/start 2021. The vessel will be equipped with ROVs, submersibles and a full range of oceanographic sampling equipment as well as a 40 seater lecture theatre and 40+ berths for scientists. The use of this vessel and other privately-funded research vessels for a global mission will be discussed. 
Professor Alex Rogers, University of Oxford, UK
Professor Alex Rogers, University of Oxford, UKAlex Rogers has worked as a marine ecologist for the last 25 years specialising in deep-sea and Antarctic ecology as well as coral reef ecosystems. He graduated in Marine Biology from the University of Liverpool where he also received his PhD in the ecology and genetics of marine invertebrates. From there Alex won research fellowships at the Marine Biological Association of the United Kingdom in Plymouth and at Southampton Oceanography Centre. He went on to lead the Biodiversity Programme at British Antarctic Survey as Principal Investigator before moving onto the Institute of Zoology at London Zoo. For the last 7 years Alex has worked as Professor of Conservation Biology at the Department of Zoology, University of Oxford. Alex is primarily interested in where life is distributed in the ocean and what environmental factors determine this distribution. He has worked on deep-sea ecosystems including cold-water coral reefs, seamounts, and hydrothermal vents. He led the scientific expedition to describe the first deep-sea hydrothermal vents in the Antarctic which turned out to be occupied by a completely novel fauna including a new species of yeti crab and a variety of other animals such as snails, stalked barnacles and sea stars. Most recently Alex has also worked on coral reef ecosystems in the Caribbean with a focus on mesophotic or twilight-zone reefs. Alex has used a variety of approaches in his work including sampling from ships, satellite remote sensing, the use of remotely-operated vehicles, submersibles and SCUBA diving. His ship-board work has included expeditions to the North Atlantic, Southern Indian Ocean, and Southern Ocean, including four as Chief Scientist. The most recent of these expeditions was to Bermuda where Alex led the exploration of mesophotic ecosystems around the islands and nearby seamounts. This work was achieved in submersibles and with a technical diving team and discoveries included the deepest recorded invasive lionfish. Alex’s work has brought him into direct contact with human impacts on the oceans including damage caused by deep-sea bottom fishing and contamination of the environment with plastics. He has also worked on policy and governance with respect to management of human activities in the ocean, especially the high seas. He has received the Zoological Society of London – Marsh Award for Marine and Freshwater Conservation and a ZSL Fellowship for his services to conservation. Alex has also worked for a variety of non-governmental and intergovernmental organisations including WWF, Greenpeace, the UN Division for Oceans and Law of the Sea and the International Union for Conservation of Nature. Alex was also scientific advisor for the Global Ocean Commission, which was based at Somerville College where Alex is a Fellow. |
|
| 14:30 - 15:00 | Discussion | |
| 15:00 - 15:30 | Tea | |
| 15:30 - 16:00 |
Planning and executing a round-the-world deep sea expedition: experience from the 5-Deeps
The deepest part of the world’s oceans, the hadal zone, (6000 to 11,000 metres deep) has in recent years has seen a renaissance in basic exploration. This biozone accounts for 45% of the total ocean depth range and comprises a disjunct array of subduction trenches. Recent research has in large been supported by technological advances that have made this otherwise largely inaccessible frontier accessible. While a new generation of ‘Hadal-landers’ are now common place, various attempts to expand ultra-deep exploration beyond baited systems have often been short lived (e.g. ROVs, HOVs). In the spirit of the HMS Challenger Expedition, a new round the world deep-sea expedition is underway. The 5-Deeps Expedition is the first expedition to attempt to send a human to the deepest point in each of the Earth’s five oceans in a submersible: Arctic, Antarctic, Pacific, Atlantic and Indian Ocean, as well as explore another 7 deep areas. The expedition will run for at least 13 months, starting in August 2018 and will travel nearly 60,000 kilometers around the globe on the Deep Submergence Support Vessel (DSSV) Pressure Drop. The dives will be undertaken using the newly designed and constructed 2-man submersible, DSV Limiting Factor, aided by three science landers. Large areas of hadal sea floor will be mapped using a new high resolution multibeam echo sounder mounted on the Pressure Drop. This is an opportunity to hear first-hand about the recently announced expedition including the planning, execution, logistics and other considerations for going beyond Challenger on other such endeavours. 
Dr Alan Jamieson, Newcastle University, UK
Dr Alan Jamieson, Newcastle University, UKDr Alan Jamieson is a senior lecturer in deep-sea biology at Newcastle University, UK. His research focusses on the biological exploration of the hadal zone. He has designed multiple Hadal-Landers and has deployed them nearly 250 times in the trenches of the Pacific Ocean and surrounding areas. He has participated in, and often led, 50 deep-sea expeditions. He has published over 80 scientific papers and sole authored the book The Hadal Zone, life in the deepest oceans (2015). He is a fellow of the Royal Geographic Society and is currently the Chief Scientist on a forthcoming round-the-world deep-sea expedition (2018-2019). |
|
| 16:00 - 17:00 | Panel discussion/overview |